|
Automated Calibration System
VenusExpress is the first mission of the European Space Agency (ESA)
for the research of Venus. The engineers of KFKI RMKI and SGF Ltd. have
developed an automated calibration system for the ASPERA-4 (Analyzer of
Space Plasma and EneRgetic Atoms) experiment. This distributed
intelligence data acquisition system has a real-time operating system
running on PC/104 type processor boards, and the user interface program
runs under Windows XP on a portable computer. A specific feature of the
system is the high voltage protection and galvanic isolation of the
components.
Research of Venus had been done by Russian and
American space probes in the past. Most knowledge was provided by the
Magellan
space probe of NASA. ESA uses in VenusExpress main parts of the
MarsExpress
space probe but with significant modifications coming from the
differences
between the two tasks and environments. Most important modifications
were the
reconstruction of the heat protection system and the use of radhard
electronics
owing to the four times bigger radiation.
VenusExpress was launched in November 2005 from Baikonur Space
Center in Kazakhstan
with a Soiuz-Fregat
rocket. The fly-over took 153 days, and the orbit was located above the
poles
of Venus with 250 km
as the nearest and 66000
km
as the farthest point from the planet. The investigation lasted 500
Earth days,
i.e. 2 Venus days.
Researchers of KFKI RMKI and engineers of SGF Co.
Ltd. took part in the ASPERA-4 experiment, and have provided new
information
about the coupling of plasma and neutral gases around Venus. This
information was
quite relevant for understanding plasma processes and mass balance, and
for the
research of upper atmosphere, the
ionosphere and planet development. ASPERA-4 is an interdisciplinary
experiment
in the research of planets and space plasma physics.
Engineers had to ensure the calibration of ASPERA-4
which is absolutely mandatory for the right evaluation of measurements
at
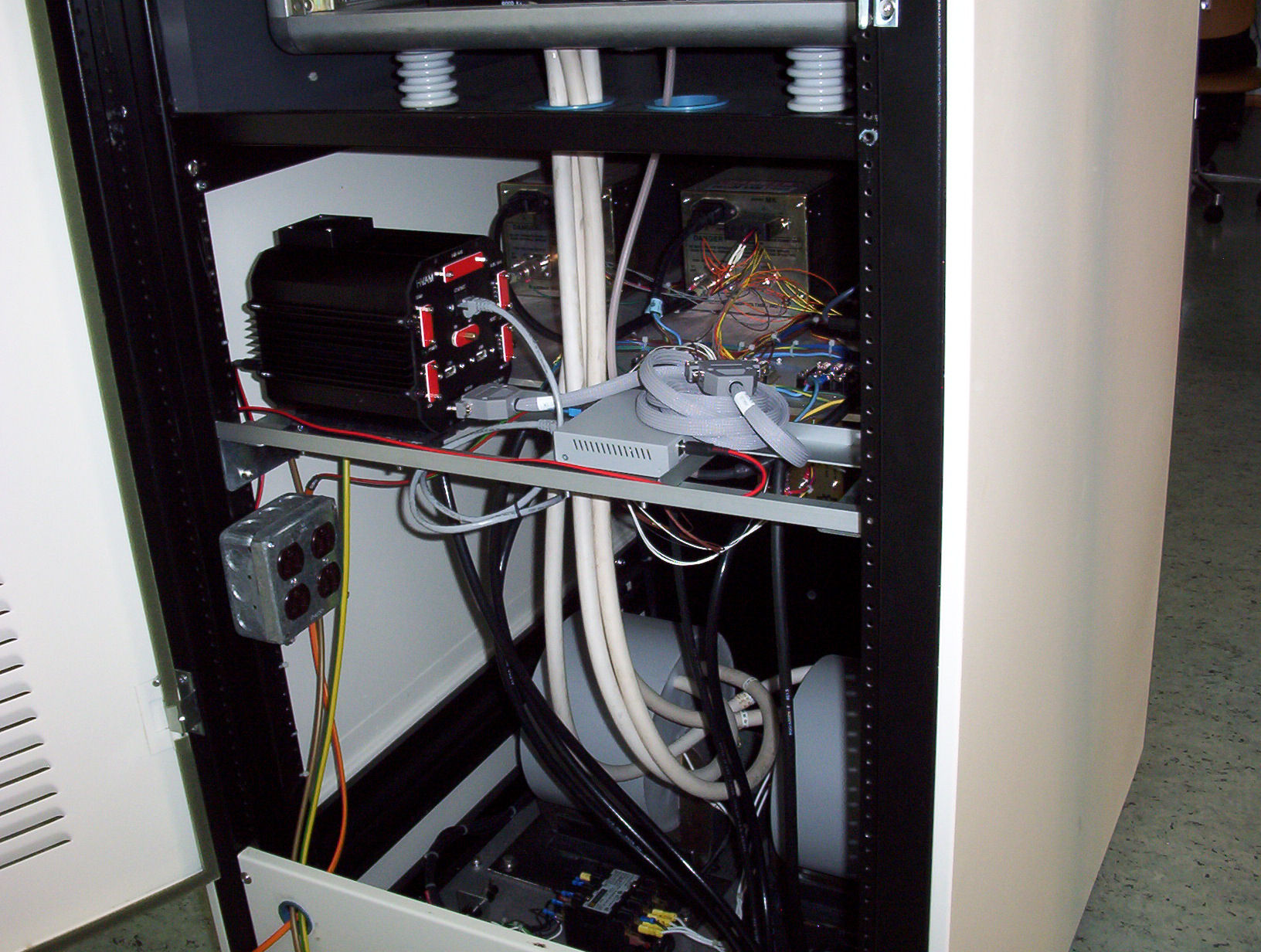
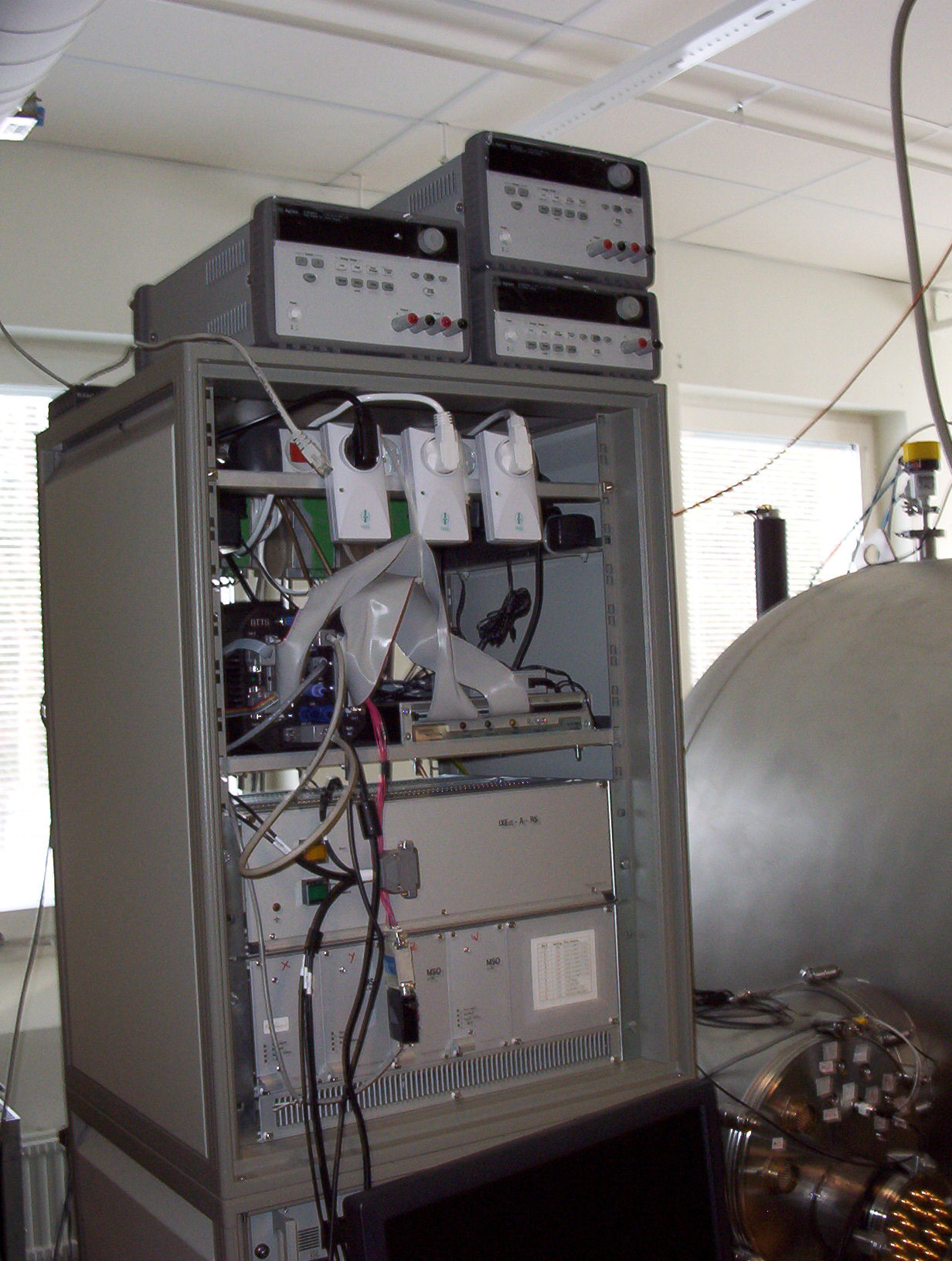
Venus. This was done by an automated calibration system set up at the
particle
accelerator in Institutet för RymdFysik (IRF), Kiruna, Sweden.
The system serves for calibrating the ASPERA-4 sensors with the ion
source, and
its automation significantly accelerated calibration measurements and
also made
them reproducible.
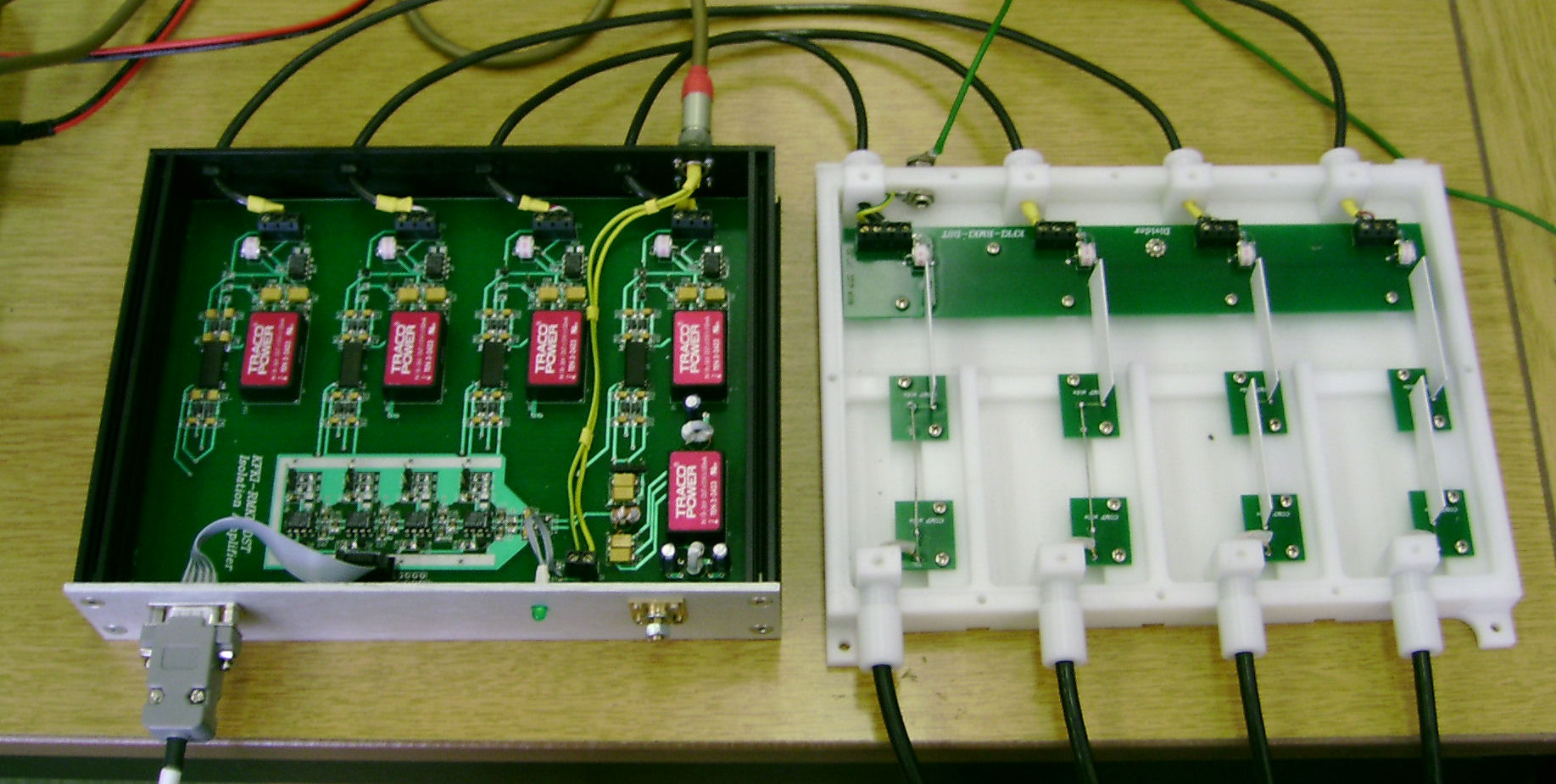
The realized calibration system was installed in
the spring of 2005 together with IRF engineers. The distributed
intelligence
system is built of PC/104 type processor boards that communicate with a
portable computer through TCP/IP protocol. These Intel-compatible
processors
are driven with a Linux-based real-time multi-tasking operating system
while
Windows XP runs on the portable computer.

26.December 2014
|







{kind=link}